Biped - Archie
Archie: Modular Biped Robot Project (Legacy Release)
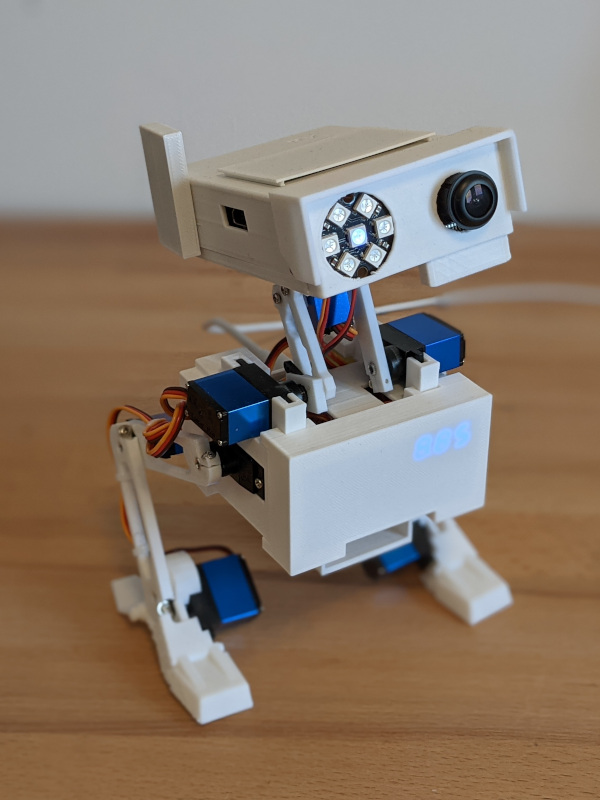
Archie is the original version of the Modular Biped Robot Project, designed as a smaller, experimental build for robotics enthusiasts. While no longer supported, Archie remains an important milestone in the evolution of the project and is available for reference and inspiration.
Project Overview
The Modular Biped Robot Project provides a flexible framework for robotics development using Python and C++ on the Raspberry Pi and Arduino platforms. Archie was the first release, focusing on modularity and experimentation with custom PCBs, 3D-printed parts, and open-source software.
Key Features
- Compact Design: Smaller form factor for easy prototyping and experimentation.
- Custom PCBs: Two custom boards (Upper and Lower) for connecting Raspberry Pi, Arduino, and servos.
- Servo Control: Arduino Pro Mini for managing leg and head servos.
- Sensor Integration: Support for MPU6050 accelerometer/gyroscope and RCWL-0516 microwave sensor.
- Vision: Raspberry Pi-compatible camera module for vision input.
- Audio: Buzzer for simple audio output.
- Neopixel Eye: Adafruit Neopixel Jewel for expressive robot eye.
- 3D Printed Parts: STL files available for printing the robot body and joints.
- Open Source Code: Python and C++ code for robot control, available on GitHub.
Getting Started
Archie is a legacy release and is no longer actively maintained. For reference, you can access the code, PCB files, and 3D print files:
For build videos and more information:
Contributing
Although Archie is no longer supported, the Modular Biped Robot community welcomes your questions, ideas, and contributions. Join the discussions and connect with other makers:
Note
For the latest version of the Modular Biped Robot Project, please refer to the Buddy or Cody builds. Archie remains available for reference and learning.